| T-Plan Robot Enterprise 4.3.1 Doc
Collection |
25/09/17 |
| Factor |
Automation
over ADB w/ Screen Mirror |
Automation
over ADB only |
Automation
over VNC |
| Rooting |
+ Not required |
- DroidVNC: The device must be
rooted + VMLite VNC: The device doesn't have to be rooted |
|
| Network |
+
Not required (network is optional) |
+
No network required (only USB) |
- DroidVNC: Network connection required
(Wi-Fi) + VMLite VNC: Network or USB connection required |
| SW Requirements |
-
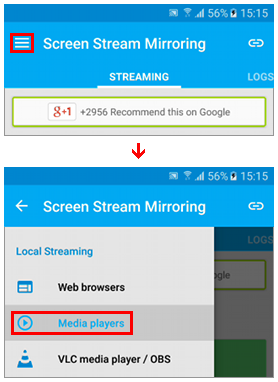
Screen mirroring application required on the device |
+ No SW installation on the
device required |
- VNC server required on the
device |
| Keyboard Support |
+ Good support of the Android native keys | - Support of the Android
native keys is subject to the server vendor |
|
| Screen Performance |
+
Good screen refresh rate (see performance) |
-
Slower screen refresh rate for large screen devices due to lack of image compression in the Android SDK |
+ Fair screen
refresh rate for large screen devices (depends on the preferred image encoding) |
| Gaming Support |
+ Supported |
-
Limited support (no OpenGL content) |
|
| Screen Rotation |
+ Both
automatic and manual screen rotation supported |
- Manual screen rotation only
supported |
|
| Pinch & Zoom |
+ Supported (Robot 3.5+/Android 4.3+) | - Not supported |
|
adb tool which is only in the
full Android Studio release.<SDK_path>/tools/android
tool.
- Android 4.1 and lower: Go to Menu->Settings->Applications->Development and set on the "USB Debugging" option.
- Android 4.2 and higher:
- Go to Menu->Settings
- Select the About menu in the More or General group. On some devices it is located under Settings->About->Software->Information->More.
- Scroll to Build Number and tap it 7 times until you see a message saying “You are now a developer” or ”Developer mode has been enabled”.
- Go back to the Settings menu, select the Developer Options and turn on the slider at the top to enable the options. Then set on USB Debugging.
adb.exe to the user or
system path:adb.exe
to the beginning of the list. To separate the path from the
original value use semicolon,
';'. The new value should look like: <SDK_path>\platform-tools;<originalPaths> "adb devices" from the platform-tools/
folder of your Android SDK. Alternatively leave the field on "default"
to connect to the first detected device.Performance Considerations
If the video is slow or lags behind considerably:
platform-tools
folder under the Android SDK installation path.adb kill-serveradb
devices
Connect adb://default Java test
scripts: connect("adb://default");
Connect adb://MB104PY10519 Java test
scripts: connect("adb://MB104PY10519");
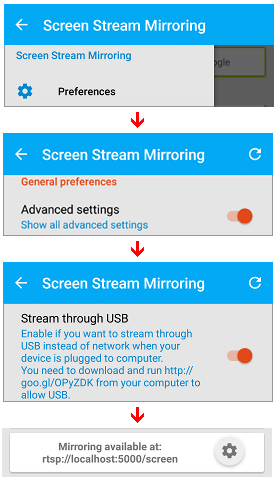
To set on the screen
mirror data transfer use:TPR test scripts:Connect adb://MB104PY10519screen=mirror
Java test scripts:connect("adb://MB104PY10519","screen","mirror");
Another alternative is
to encode the parameters to the connect URL query. This form is also
suitable for the -c/--connect
CLI connection. You may copy the URL of any of your recent
connections from the Tools->CLI Wizard window.
Another alternative is to give your connection a name in the Desktop->Connection
Manager window and then use it instead of the URL.
TPR test scripts:Connect adb://MB104PY10519?screen=mirror
Java test scripts:connect("adb://MB104PY10519?screen=mirror");
 |
|
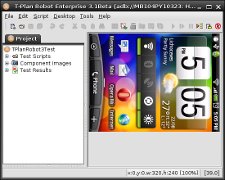 |
| Correct
view |
Incorrect
view Search for components using the image comparison will not work and the touch screen events will be misplaced. |
| Device Action |
Computer Action |
Test Script Action |
| Tap (touch) |
Left mouse click |
Call the Mouse click command (TPR scripts) or one of the mouseClick() methods (Java scripts). |
| Long tap (touch) |
Long left mouse click |
Call a
sequence of Mouse press, Wait and Mouse release
commands or the corresponding Java methods. |
| Swipe (drag) | Mouse drag (left button down) |
Call the Mouse drag command (TPR scripts) or one of the mouseDrag() methods (Java scripts). |
| Pinch (zooming with 2 fingers) |
Pinch/zoom action |
Call the Mouse pinch/zoom command
(TPR scripts) or one of the mousePinch()
or mouseZoom()
methods (Java scripts). Supported since Robot 3.5. Requires device running Android OS 4.3 or higher. |
| Back |
Right mouse click |
Call the Mouse
click btn=right command (TPR scripts) or one of the mouseRightClick()
methods (Java scripts). Alternatively use "Press Back" or press("Back"). |
_UIACLICK
variable to true ("enable") or false
("disable"). This mechanism overrides the above user preference.
It has no impacts on other test scripts executing concurrently
within the same Java process. For example, to enable it just for
one particular click use: Var _UIACLICK=true
Mouse "click"
Var _UIACLICK=false Press Alt+Z"
generates the Euro character on some devices. These composed
keys are subject to the device, its language and keyboard
settings and they must be explored per device.| Android Device Key |
Computer/Script
Key (Action) |
Description |
| BACK |
Escape, Right mouse click |
Back key. |
| CALL |
PageDown |
Call key. |
| CAMERA |
F6 |
Camera key. Used to launch a camera application or take pictures. |
| CLEAR |
F7 |
Clear key. |
| DEL |
Backspace |
Backspace key. Deletes characters before the insertion point. |
| DPAD_DOWN |
Down (Arrow Down), Mouse wheel down |
Directional Pad Down key. May also be synthesized from trackball motions. |
| DPAD_LEFT |
Left (Arrow Left) |
Directional Pad Left key. May also be synthesized from trackball motions. |
| DPAD_RIGHT |
Right (Arrow Right) |
Directional Pad Right key. May also be synthesized from trackball motions. |
| DPAD_UP | Up (Arrow Up), Mouse wheel up |
Directional Pad Up key. May also be synthesized from trackball motions. |
| ENDCALL |
End |
End Call key. |
| FOCUS | F5 |
Camera Focus key. Used to focus the camera. |
| HOME |
Home |
Home key. This key is handled by the framework and is never delivered to applications. |
| MENU |
PageUp |
Menu key. |
| NOTIFICATION |
F9 |
Notification key. Used to display the list of
notifications. |
| POWER |
F10 |
Power key. |
| SEARCH |
F3 |
Search key. |
| SOFT_LEFT |
F1 |
Soft Left key. Usually situated below the
display on phones and used as a multi-function feature key for selecting a software defined function shown on the bottom left of the display. |
| SOFT_RIGHT |
F2 |
Soft Right key. Usually situated below the
display on phones and used as a multi-function feature key for selecting a software defined function shown on the bottom right of the display. |
| SYM |
F8 |
Symbol modifier key. Used to enter alternate
symbols. On most devices it pops up the "Select input method" window. |
| VOLUME_DOWN | F11 |
Volume Down key. Adjusts the speaker volume down. |
| VOLUME_UP | F12 |
Volume Up key. Adjusts the speaker volume up. |