Object Search and Static
Image Testing
T-Plan Robot Enterprise v2.2 introduces two new features which target testing of imaging systems
such as the GIS (Geographic Information System) and CAD (Computer Aided
Engineering) ones.
The first one is
Static Image
Client which allows automation against images loaded from the
file system. The client behaves the same way as a
live desktop client such as the RFB/ one. Image files may be loaded
interactively by the Login dialog or in an automated manner through the
"-c" option or by calling
the
Connect command with an argument in form of
"file://<path_to_the_image>".
Static
image
testing may be successfully applied in a number of
scenarios:
- Testing of images,
such as screen shots, photographs, maps, paintings and outputs of
various image producing systems,
- Testing of systems
which update an image file (for example a status screen shot).
Since the client periodically
checks the image file size and time stamp and reloads the image
whenever a
change is detected, it may be used to test systems which generate
output into an image file (or image files).
- Debugging of failed image
comparisons from live desktop testing. If you modify your script
to save the VNC desktop image to a PNG file whenever image comparison
fails unexpectedly, for example using the
Screenshot command, you may open the file later on and reapply the image
comparison to find out what was wrong. You may eventually easily
recreate the image template
from the image and verify the new functionality using the
standard GUI tools.
Testing of images has a few specific aspects. Unlike live desktops,
static images don't consume key events and the
Press and
Type/Typeline actions are disabled. If the image is truly static meaning that it is
not being updated by an outside process, it also doesn't make sense to
wait for an update
event through the
Waitfor command.
The second feature is
Object Search image comparison method. It was designed to locate objects of a
particular color or a range of colors. Though this approach is not
suitable for classic GUI components, it performs well on low color
outputs from imaging systems such as maps, drawings, schemes, etc. The
Object Search is typically applied to images loaded through the Static
Image Client or to live VNC desktops displaying the target image.
The method accepts an
optional
template which must contain exactly one object of the specified
color. When specified the method filters out the list of objects
located to leave just those which are similar to
the template image shape up to the ratio specified by the
passrate parameter. If the
rotations parameter is also
specified and is greater than 1, the object list will be matched
against the list of template shapes rotated the specified number of
times. This allows to build test tasks like "search for all green
rectangles which might be in any level of rotation".
The object color is specified by the
color parameter. The
range of accepted
object colors is specified by the
toleranceparameter which is
similar to the
Tolerant Image Search one. It is a number between 0 and 255 which indicates how much the Red,
Green and Blue components of a pixel may differ at a maximum to
consider the color be equivalent to the object color specified by the
color parameter. Be aware that the
higher the tolerance value, the higher the probability of false shape
detections is. In most scenarios the value should be in the [0, 100]
range depending on how much the object is changing, for example as a
result of blurring caused by rotation. If the parameter is not
specified, it defaults to zero and the algorithm looks for solid color
objects only. For a complete specification of algorithm parameters see
the
Object
Search
specification.
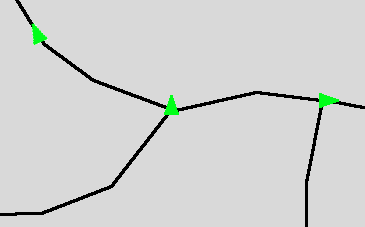
As an example let's consider a map-like image with black paths and
green triangle objects:
Our goal is to find out the number
and location of green triangles.
This is a perfect task for the static image client combined with the
object search algorithm. The script code as well as a video follow.
You may optionally
download
the complete test suite and try it out on your own environment.
Since image testing is platform independent, the example will work fine
on all operating systems supported by T-Plan Robot Enterprise.
# Make the script look for
template images in the same dir as the script
Var _TEMPLATE_DIR="{_SCRIPT_DIR}"
#
Connect to
the map image.
Connect file://{_SCRIPT_DIR}/map.png
# Locate all
triangles and highlight them on the screen
Compareto "triangle.png" method="object" passrate="85" rotations="40" color="01FF19" tolerance="100" draw="true"
# Pause the
script to allow to review the results.
#
Resuming
will
finish the script and clear up the drawings.
# Should you need to work with the objects further on, their number
# and coordinates are available through variables populated by the
"object" method.
Pause
|

Image testing example
on Ubuntu Linux
|
| 12 December 2014
|
|
Version 1.0
|
 one. Image files may be loaded
interactively by the Login dialog or in an automated manner through the
"-c" CLI
one. Image files may be loaded
interactively by the Login dialog or in an automated manner through the
"-c" CLI