Supported Configurations
As the tutorial is full of examples which are best practiced on a live
system, one of the very first tasks will be to set up your own test
environment. Before we proceed to installation instructions you have to
select one of the supported configurations. This doesn't apply to
scenarios of
static image testing where
no special configuration is
required.
T-Plan Robot acts as a
client of
remote desktop software and as such it is limited by
requirements of the particular remote access technology. As it
primarily relies on the RFB protocol, it can automate
any configuration supported by . VNC software typically operates in a client-server environment where
the client and server are physically two different machines or at least
two different OS instances. That's why we distinguish two systems in
each supported configuration:
- The Client System runs Java and T-Plan Robot Enterprise.
- The System Under Test () is an OS desktop (
VNC server)
instance which runs the
Application
Under Test (AUT).
- This system is also sometimes referred to as
test environment, especially when
the SUT is a separate machine.
There are basically three possible configurations:
- Local Desktop Automation.
- Single OS with multiple desktops.
- Single machine with multiple OS
instances (VirtualBox or
VMware scenarios).
- Dual machine environment
(classic client-server
configurations).
1. Local Desktop Automation
 | T-Plan Robot Enterprise version 3.2 introduced support of automation of applications displayed on the local desktop. This means that Robot and one or more Applications Under Test (AUT) run on the same local desktop. The automation is of course not limited to the AUT, and it may perform any desktop action that a regular user can do.
Advantages: - Single machine scenario with no need of another computer and/or OS.
- It relies just on the local Java SE installation and it requires no other software to be installed. This allows to use Robot in non-intrusive scenarios where the target system may not be modified.
In an extremely isolated scenario, the file based distributions of Robot and Java can be copied to an external media(CD, DVD, USB drive) and executed from there to keep the SUT free of any installation. - Fast & easy operation.
|
Please Note: Test script relying on the Local Desktop connection can not be started remotely through a terminal such as telnet or rsh. Use the VNC Server connection for such scenarios instead.
For more information please view our release note topic: Local Desktop Automation.
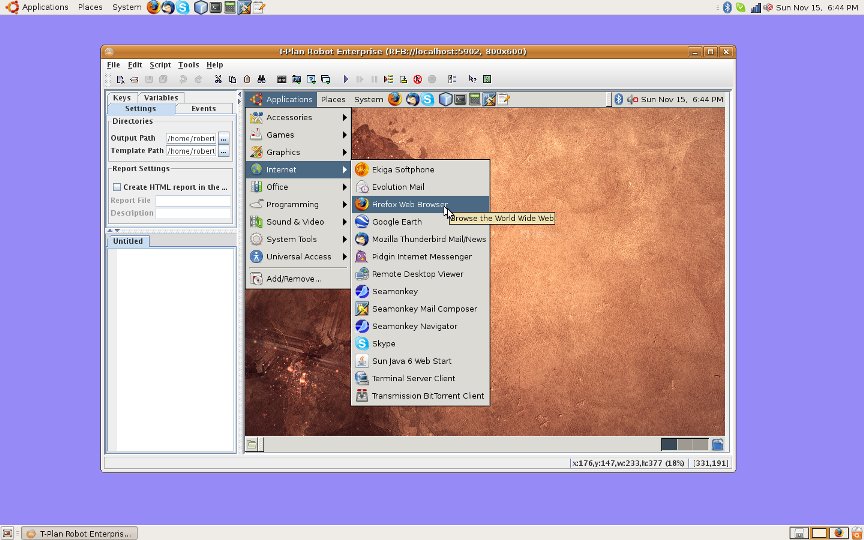
2. Single OS with multiple desktops
 | Configurations with
a single machine/OS with multiple desktop instances are
supported just by
Linux/Unix which allow to run multiple VNC servers on a single system.
Each server instance runs on its own port and provides a standalone
graphical desktop independent from the default system one (the one you
see on your screen). The machine in this case serves both as the client
system and the SUT. T-Plan Robot typically (but not
necessarily) runs
on the default system desktop (as is displayed in the picture) and
automates a local VNC server instance with the AUT. An
example
of T-Plan Robot
connected to a local VNC server on Ubuntu Linux has been shown in
the previous topic. This configuration is fairly easy to set up:
-
Install any supported VNC server and start
it.
- Install Java JDK 1.6 and T-Plan Robot
Enterprise.
- Start T-Plan Robot Enterprise and connect
to the VNC server (typically localhost:5901).
|
This configuration is not supported by MS Windows where the VNC server attaches to the default system desktop and as such it may run just once. If you make an attempt to connect T-Plan Robot Enterprise (or any other VNC client in general) to a local VNC server within a single Windows system, you will experience so called infinite mirroring effect (see example) which will render the client unusable.
3. Single machine with multiple OS
instances
 | This configuration takes advantage of
virtualization technologies such as
VirtualBox or
VMware. In this scenario your
default OS (called "hosting system" in virtualization terminology) runs
a virtual machine (VM) with its own OS (called "hosted system"). You
may have noticed
an
example of Windows Vista hosting a Windows XP
system in VirtualBox in the previous topic. The
hosting and hosted systems may be any combination of OSes supported by
the particular virtualization technology.
The
hosting system typically
runs T-Plan Robot and plays role of
the client system. Though the tool may also run on another dedicated
VM instance, this configuration is not recommended with regard to a
number of environment specific issues reported by T-Plan Robot users.
The
hosted system serves as
the SUT
and runs a VNC server with the AUT. Configuration instructions: - Install VirtualBox or VMware.
- Create a VM and install the hosted OS in there.
- Install any supported VNC server on the hosted system and
start
it.
- Configure the VM to make the VNC port visible from the
hosting
system.
- Install the AUT on the hosted system.
- Install Java JDK 1.6 and T-Plan Robot
Enterprise on the hosting system.
- Start T-Plan Robot Enterprise and connect
to the VNC server on the hosted system.
|
Be aware that the client and server roles can not be reversed and the
VM can not remote control (and automate) the hosted system. Any attempt
to do so would result in the infinite mirroring effect discussed above.
If your AUT
is too complicated to install into a VM, use a dual machine environment
instead.
The same OS factors discussed in the previous configuration apply. If
you hosted system is Linux or Unix, you may start multiple VNC servers
on the VM to get a number of test environments (desktops) as long as
their ports are made visible to the hosted system. If the hosted system
is MS Windows, the VM may serve just as one single test environment.
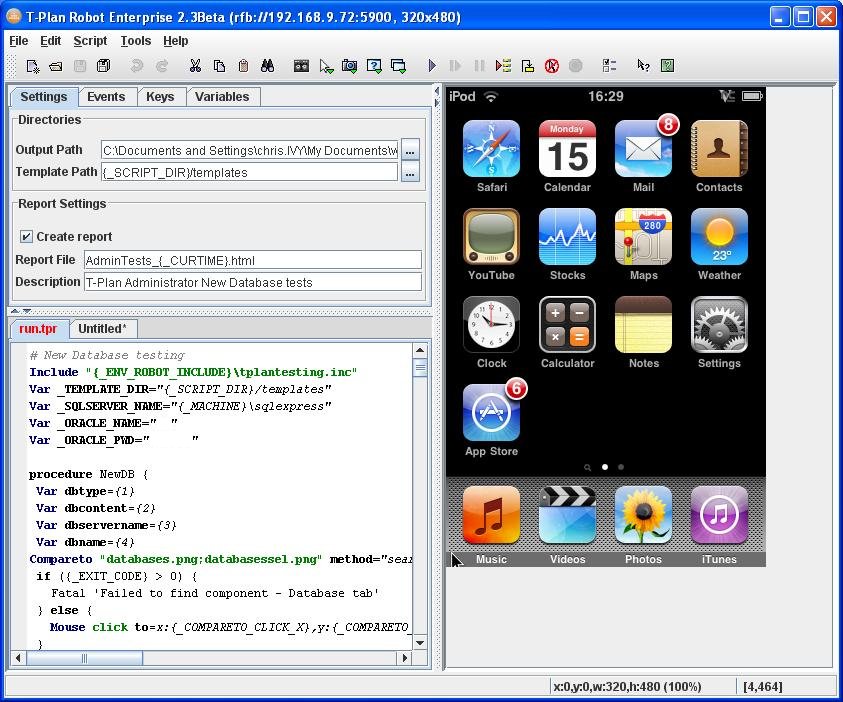
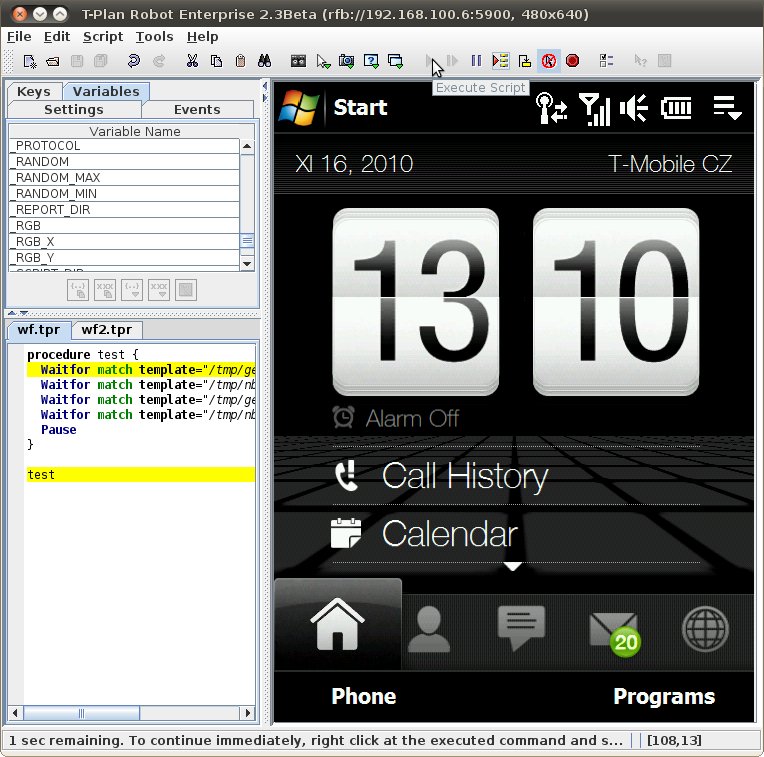
4. Dual machine environment (E.g. PC & PC, or PC & Device)

|
This
scenario presumes that you have a
stable
dedicated test server which serves as SUT. This configuration is
recommended for automation production
scenarios. As the SUT is physically
a separate machine, it is easy to
keep it in a stable state, make necessary back ups or even set up a
routine to restore the system after each test cycle. As the server is
connected to the network, it may also serve as a
test environment for multiple users (client systems) over intranet or
internet. This configuration is also the only one possible when the SUT
doesn't meet requirements for running T-Plan Robot Enterprise and thus
a single machine scenario can not be used.
Configuration steps are as follows:
- Install any supported VNC server on the SUT and start
it.
- Install the AUT on the SUT.
- Install Java JDK 1.6 and T-Plan Robot
Enterprise on the client system.
- Start T-Plan Robot Enterprise and connect
to the VNC server on SUT.
|

|
|
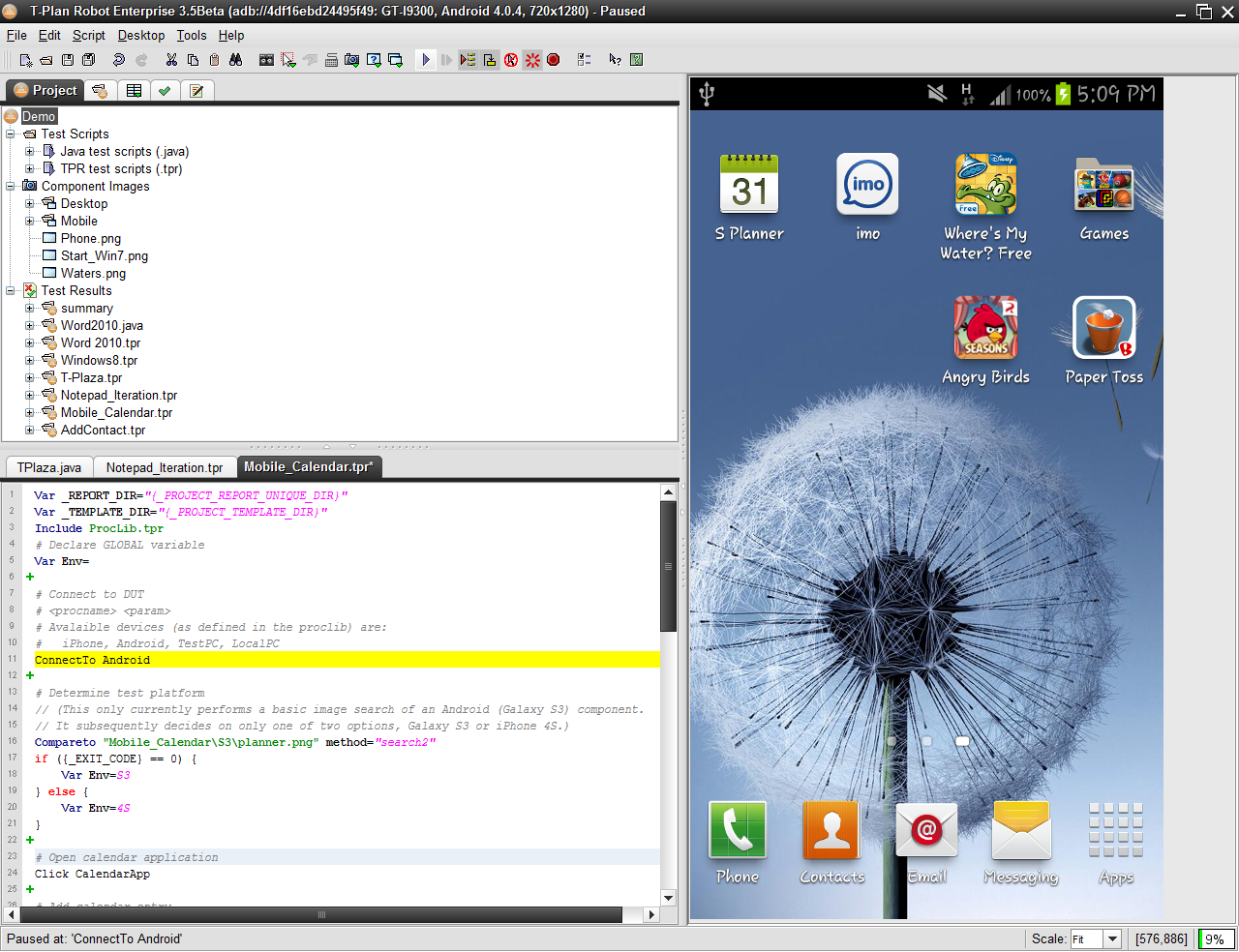
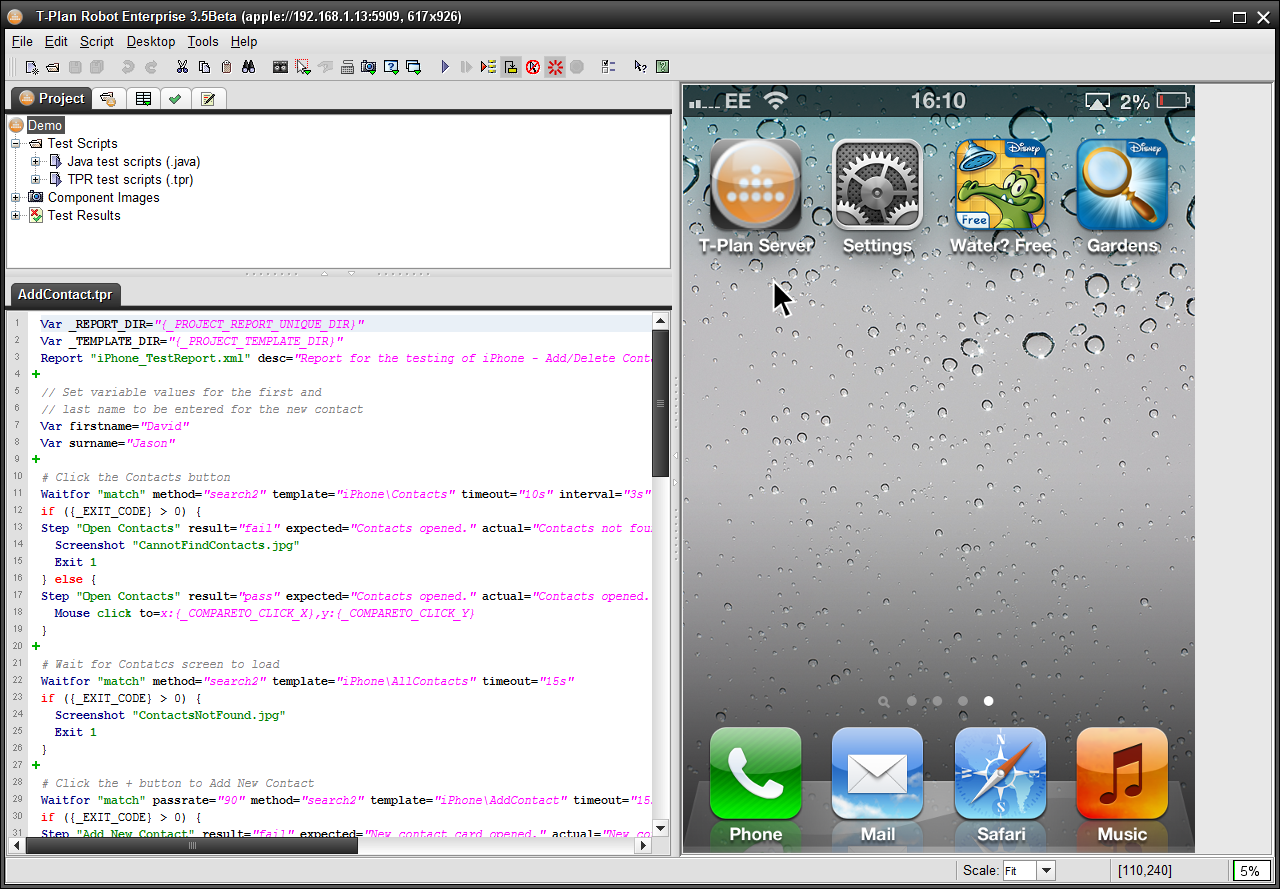
Figure 4: Dual machine environment
(PC & Device)
|
|
Supports testing on:
- iOS
- Apple iOS devices can be automated using our T-Plan Server tool with the iOS Mirror connection. Non-Jailbroken (non-rooted) devices supported.
- Veency (VNC Server for iOS from Cydia). Requires Jailbroken (rooted) devices.
- Android
- ADB (Android Debug Bridge), allows non-rooted devices to be automated via Google supported framework.
- Screen Mirroring allows fast automation of the device (like for iOS). Supports non-rooted devices.
- VNC Server automation of the device. Support for non-rooted (VMLite), and rooted (DroidVNC) devices.
- Windows
- Windows CE devices supported through VNC Server (PocketVNC / MobileVNC)
- This environment is widely used for POS (Point of Sale) devices etc.
- Windows 8.1 supported via Project My Screen (Screen Mirroring for Windows devices).
- Blackberry / Symbian etc.
All functionality common to the desktop tools usage is supported. E.g. Record & Playback, OCR etc.
Platform independence (Java). T-Plan Robot runs on, and automates all major systems, such as Windows, Mac, Linux, Unix, Solaris, and mobile platforms such as Android, iPhone, Windows Mobile, Windows CE, Symbian.
|
Analogically with the previous configurations, a Linux/Unix SUT may
provide multiple test environments while a MS Windows server just a
single one.
The SUT is not limited to computers and it may be in general any
device running an RFB 3.3 compatible VNC server, for example a mobile phone.
See for example the screen
shots of:
...in the previous topic.
| 12 December 2014
|
|
Version 1.0
|
 . VNC software typically operates in a client-server environment where
the client and server are physically two different machines or at least
two different OS instances. That's why we distinguish two systems in
each supported configuration:
. VNC software typically operates in a client-server environment where
the client and server are physically two different machines or at least
two different OS instances. That's why we distinguish two systems in
each supported configuration:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}